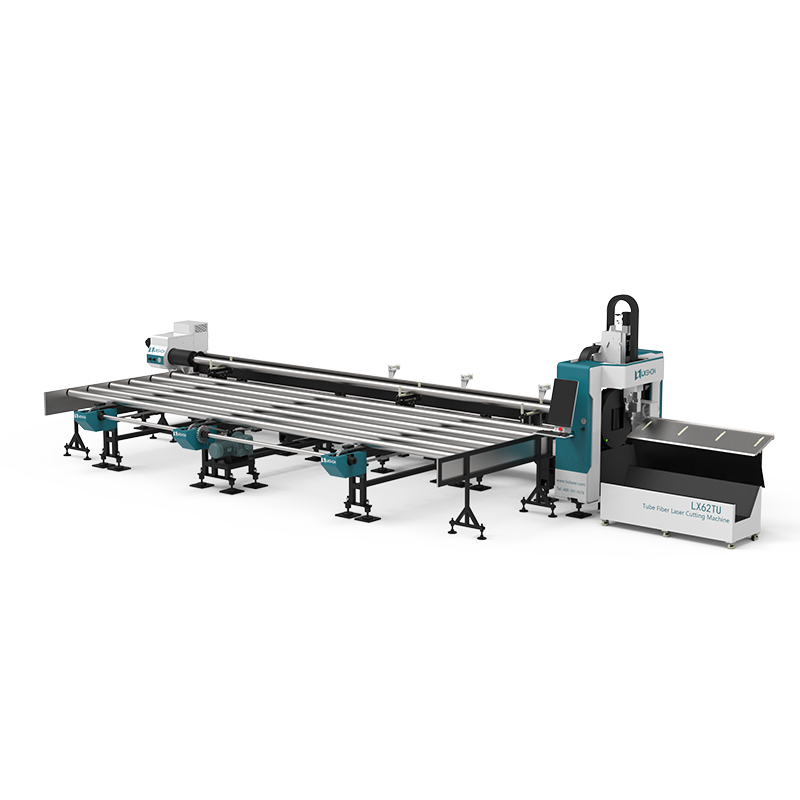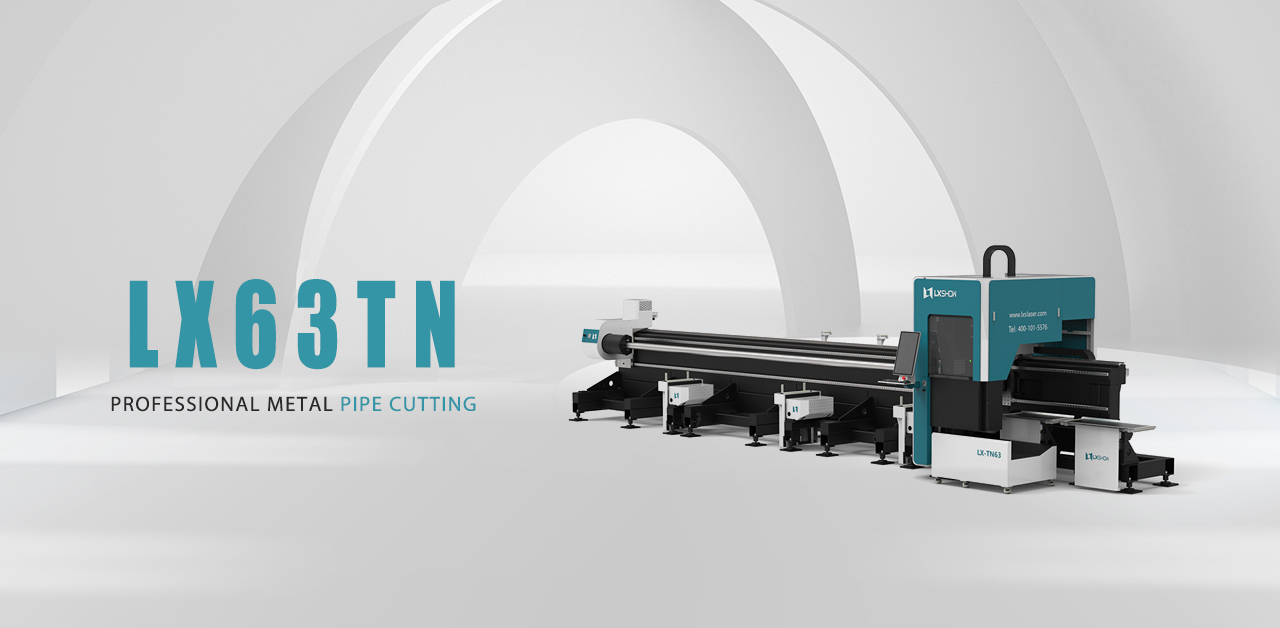

Partijiet Sodda wweldjata b'biċċa waħda b'struttura mdendla mal-ġenb
Sodda wweldjata b'biċċa waħda b'struttura mdendla mal-ġenb Is-sodda tadotta struttura mdendla mal-ġenb u sodda wweldjata f'biċċa waħda, li hija ttemprata biex telimina l-istress intern. Wara l-magni mhux maħduma, it-tixjiħ tal-vibrazzjoni jitwettaq qabel ma jintemm il-magni, u b'hekk tittejjeb ħafna r-riġidità u l-istabbiltà tal-għodda tal-magna u tiġi żgurata l-eżattezza tal-għodda tal-magna. Is-sewqan tal-mutur servo AC huwa kkontrollat mis-sistema ta' kontroll numeriku, u ċ-ċokk jirrealizza moviment reċiprokanti fid-direzzjoni Y wara li l-mutur isuq, u jirrealizza moviment rapidu u moviment ta' tmigħ. Kemm ir-rack tal-assi Y kif ukoll il-ferrovija gwida lineari huma magħmula minn prodotti ta' preċiżjoni għolja, li jiggarantixxu b'mod effettiv l-eżattezza tat-trażmissjoni; is-swiċċijiet tal-limitu fiż-żewġt itruf tal-puplesija huma kkontrollati, u apparat ta' limitu iebes huwa installat fl-istess ħin, li jiżgura b'mod effettiv is-sigurtà tal-moviment tal-għodda tal-magna; l-għodda tal-magna hija mgħammra b'L-apparat awtomatiku tal-lubrikazzjoni jżid żejt lubrikanti mal-partijiet li jiċċaqalqu tas-sodda f'intervalli regolari biex jiżgura li l-partijiet li jiċċaqalqu jaħdmu f'kundizzjoni tajba, li jista' jtejjeb il-ħajja tas-servizz tal-linji gwida, l-irkaptu u x-xtillieri.
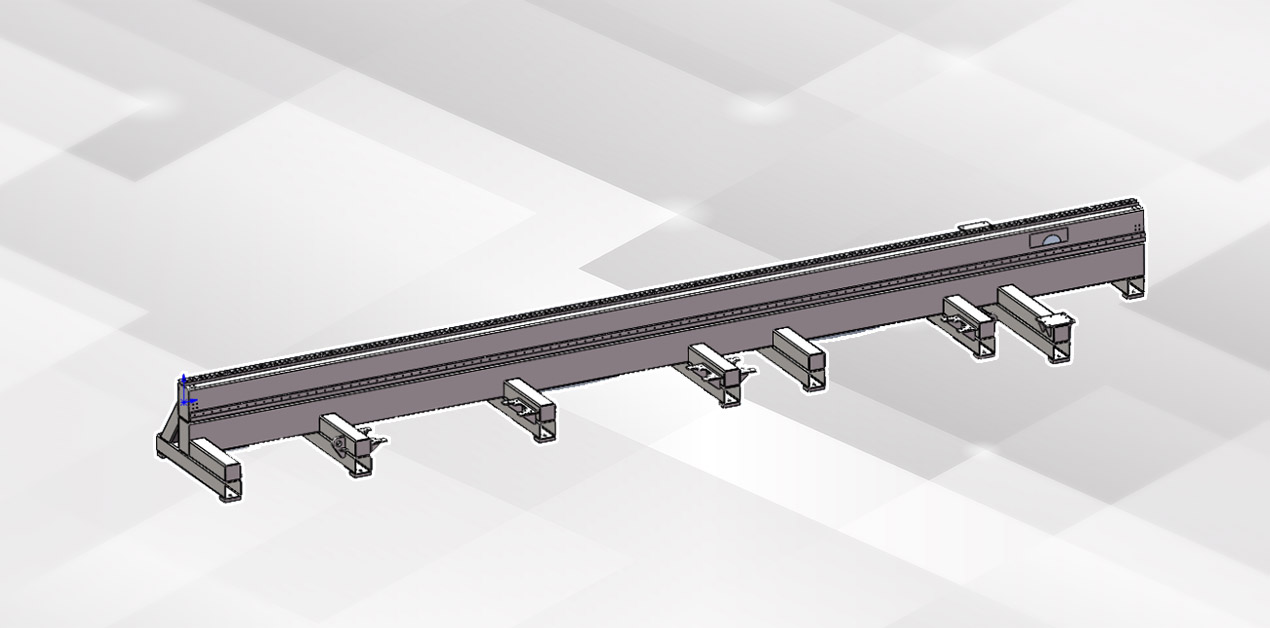
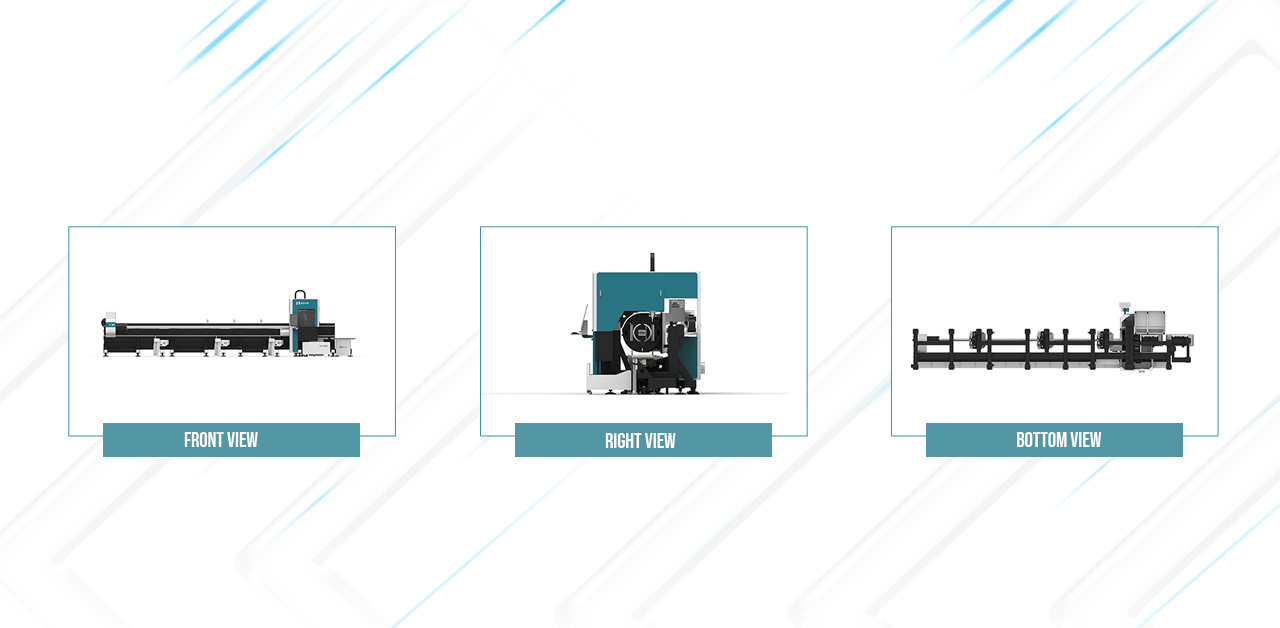
Hemm żewġ settijiet ta' mekkaniżmi ta' appoġġ installati fuq is-sodda, u hemm żewġ tipi disponibbli: 1. L-appoġġ ta' segwitu huwa kkontrollat minn mutur servo indipendenti biex jiċċaqlaq 'il fuq u 'l isfel, prinċipalment biex iwettaq appoġġ ta' segwitu għal deformazzjoni eċċessiva ta' pajpijiet maqtugħin twal (pajpijiet b'dijametri żgħar). Meta ċ-ċokk ta' wara jiċċaqlaq għall-pożizzjoni korrispondenti, l-appoġġ awżiljarju jista' jitniżżel biex jiġi evitat. 2. L-appoġġ tar-rota b'dijametru varjabbli jitneħħa u jitniżżel miċ-ċilindru, u jista' jiġi aġġustat manwalment għal pożizzjonijiet ta' skala differenti biex isostni pajpijiet ta' daqsijiet differenti.
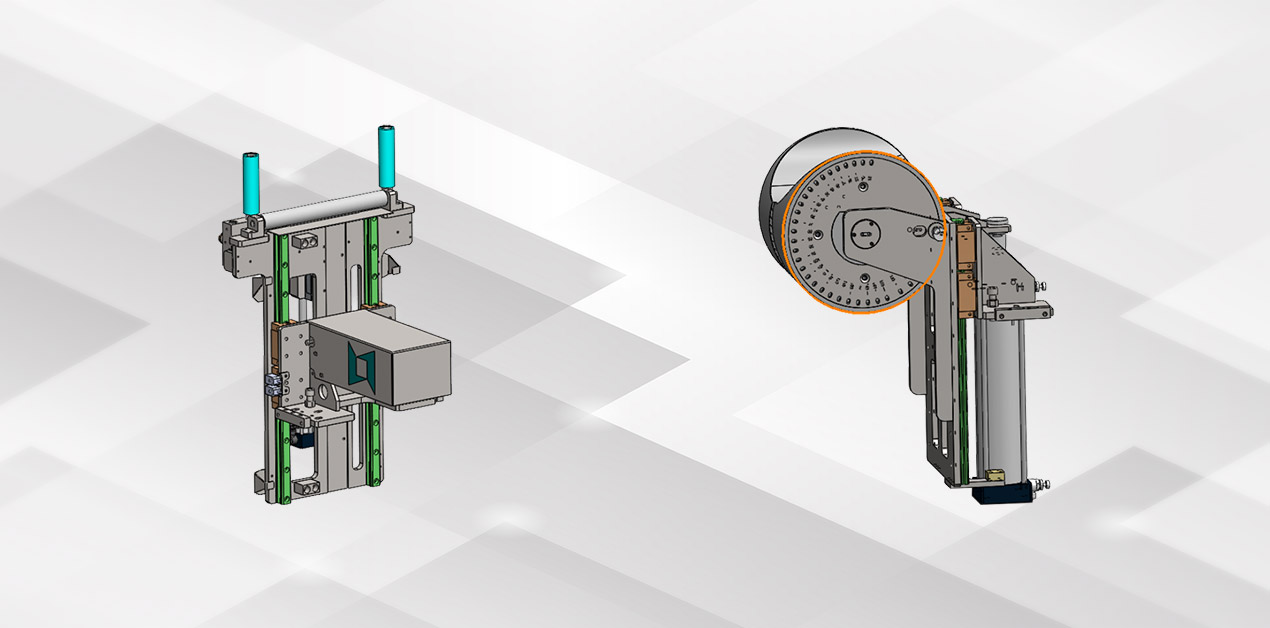
Iċ-ċokk huwa maqsum f'żewġ ċokkijiet pnewmatiċi full-stroke ta' quddiem u ta' wara, li t-tnejn jistgħu jiċċaqalqu fid-direzzjoni Y. Iċ-ċokk ta' wara huwa responsabbli għall-ikklampjar u t-tmigħ tal-pajp, u ċ-ċokk ta' quddiem huwa installat fit-tarf tas-sodda għall-ikklampjar tal-materjali. Iċ-ċokkijiet ta' quddiem u ta' wara huma mmexxija rispettivament minn servo motors biex jiksbu rotazzjoni sinkronika. Taħt l-ikklampjar konġunt taċ-ċokkijiet doppji, jista' jiġi realizzat qtugħ ta' denb qasir, u d-denb qasir tal-ħalq jista' jilħaq 20-40mm, filwaqt li jappoġġja t-tqattigħ ta' denb qasir ta' denb itwal. Il-magna tat-tqattigħ tal-pajpijiet tas-serje TN tadotta l-metodu ta' moviment u evitar taċ-ċokk, li jista' jirrealizza t-tqattigħ b'żewġ ċokkijiet il-ħin kollu, u mhux se jikkawża li l-pajp ikun twil wisq u instabbli, u l-preċiżjoni mhix biżżejjed.
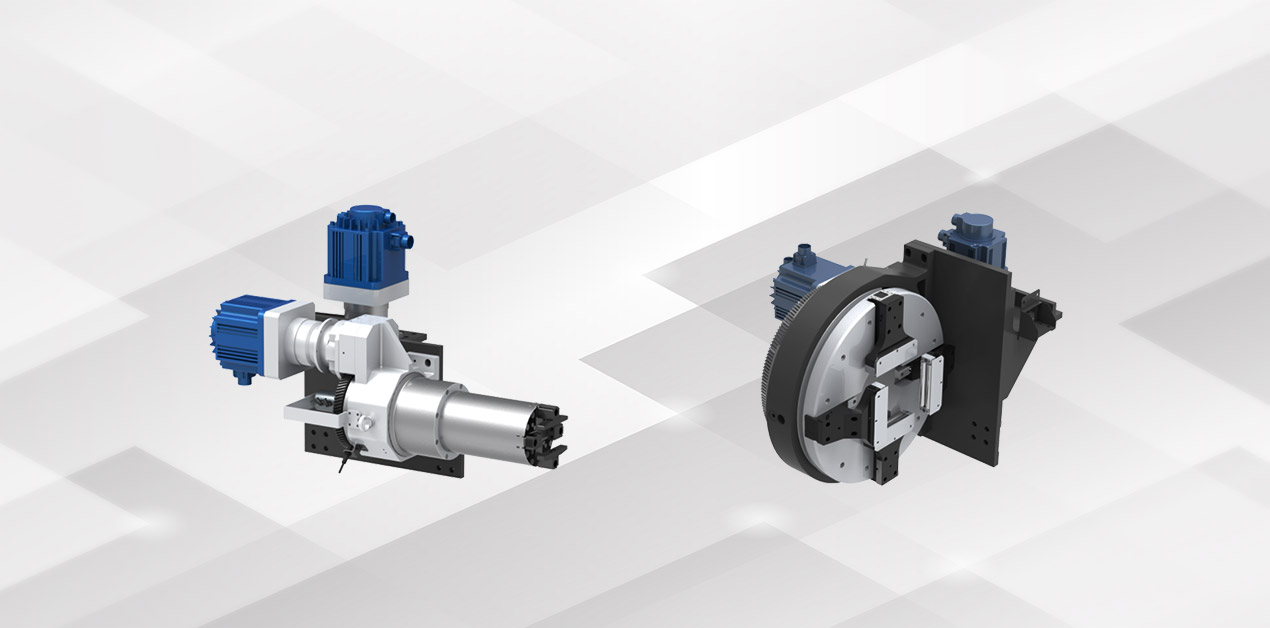
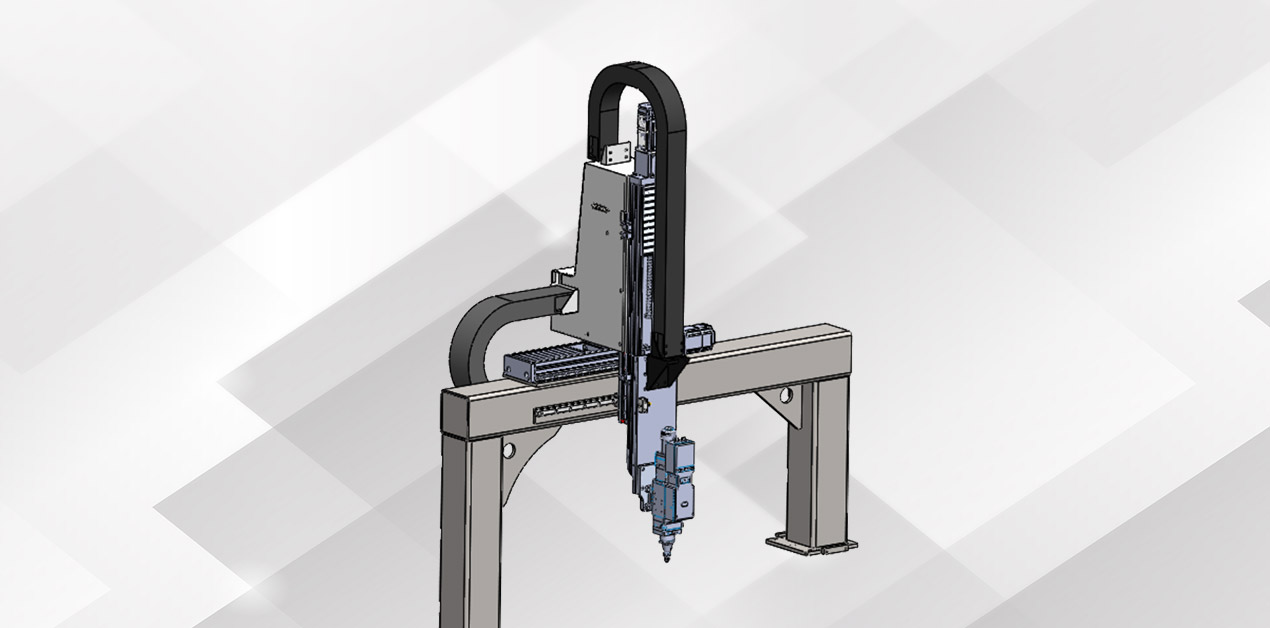
Ir-raġġ trasversali tal-apparat tal-assi X jadotta struttura gantry, li hija wweldjata b'kombinazzjoni ta' tubu kwadru u pjanċa tal-azzar. Il-komponent tal-gantry huwa ffissat fuq is-sodda, u l-assi X huwa mmexxi minn mutur servo biex isuq ir-rack u l-pinion biex jirrealizza l-moviment reċiprokanti tal-pjanċa li tiżżerżaq fid-direzzjoni X. Fil-proċess tal-moviment, is-swiċċ tal-limitu jikkontrolla l-puplesija biex jillimita l-pożizzjoni biex jiżgura s-sigurtà tal-operazzjoni tas-sistema. Fl-istess ħin, l-assi X/Z għandu l-għatu tal-organu tiegħu stess biex jipproteġi l-istruttura interna u jikseb protezzjoni aħjar u effetti ta' tneħħija tat-trab. L-apparat tal-assi Z jirrealizza prinċipalment il-moviment 'il fuq u 'l isfel tar-ras tal-lejżer. L-assi Z jista' jintuża bħala assi CNC biex iwettaq il-moviment ta' interpolazzjoni tiegħu stess, u fl-istess ħin, jista' jkun marbut mal-assi X u Y, u jista' wkoll jinxtegħel għal kontroll ta' segwitu biex jissodisfa l-ħtiġijiet ta' sitwazzjonijiet differenti.