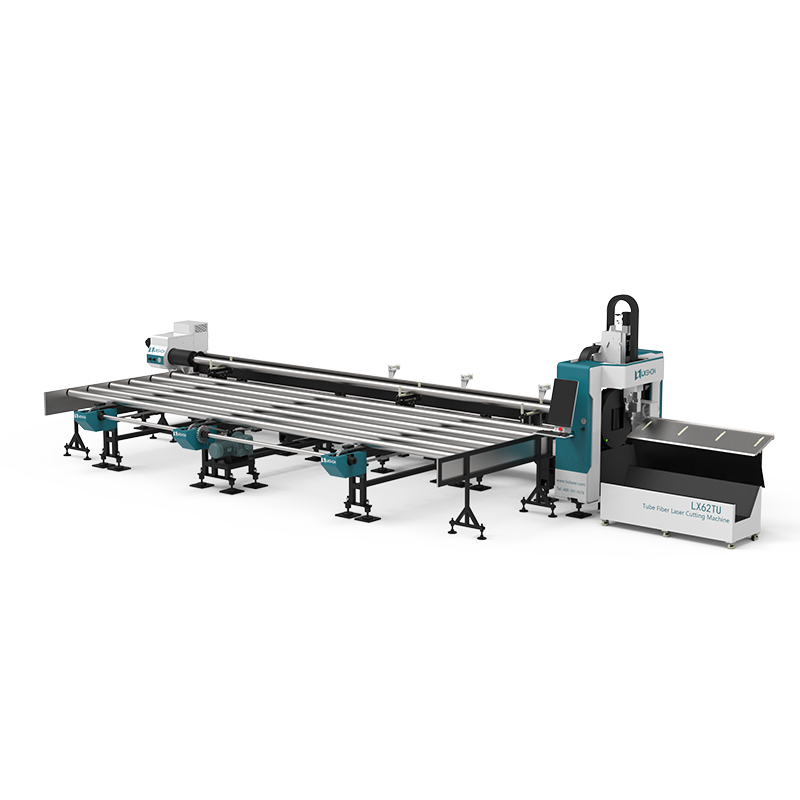

Pati Kabann soude ak estrikti soude bò kote
Kabann soude ak estrikti soude bò kote Platfòm nan adopte yon estrikti ki pandye sou kote ak yon platfòm soude yon sèl pyès, ki trete pou elimine estrès entèn. Apre machinasyon ki graj, yo fè yon pwosesis vyeyisman pa vibrasyon anvan yo fini machinasyon an, kidonk amelyore anpil rijidite ak estabilite machin zouti a epi asire presizyon machin zouti a. Sistèm kontwòl nimerik la kontwole motè sèrvo AC a, epi apre motè a fin kondwi mandrin nan, li reyalize yon mouvman rapid ak yon mouvman alimantasyon. Ni etajè aks Y a ni ray gid lineyè a fèt ak pwodwi ki gen gwo presizyon, sa ki garanti presizyon transmisyon an efektivman; yo kontwole switch limit nan tou de bout kou a, epi an menm tan, yo enstale yon aparèy limit di, sa ki asire sekirite mouvman machin zouti a efektivman; machin zouti a ekipe ak yon aparèy lubrifyan otomatik ki ajoute lwil lubrifyan nan pati mobil platfòm nan entèval regilye pou asire ke pati mobil yo fonksyone an bon kondisyon, sa ki ka amelyore lavi sèvis ray gid yo, angrenaj yo ak etajè yo.
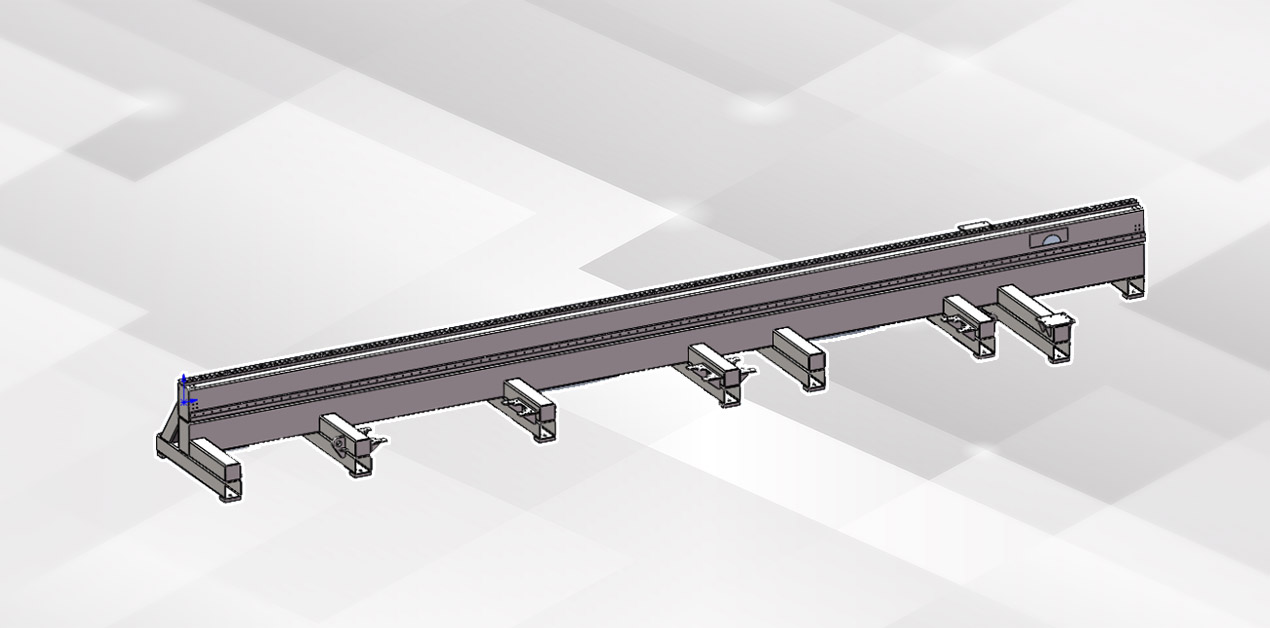
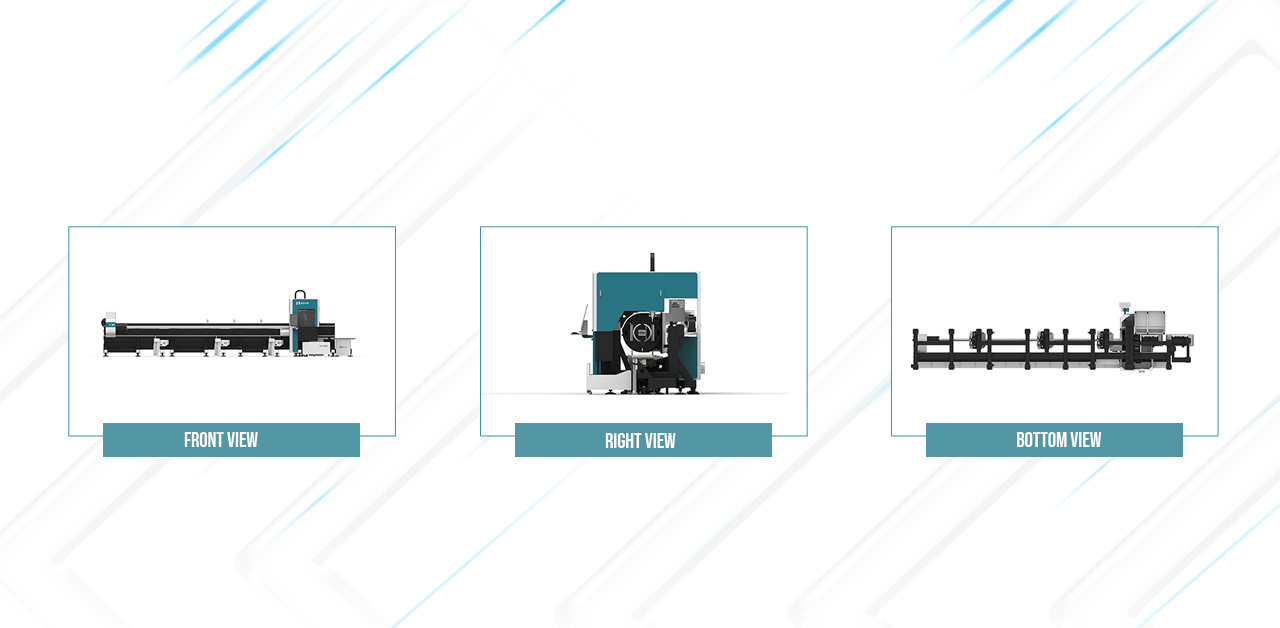
Gen 2 seri mekanis sipò enstale sou kabann nan, epi gen de kalite ki disponib: 1. Sipò swivi a kontwole pa yon motè sèrvo endepandan pou deplase monte desann, sitou pou fè sipò swivi pou defòmasyon twòp nan tiyo koupe long (tiyo ki gen ti dyamèt). Lè mandrin dèyè a deplase nan pozisyon ki koresponn lan, sipò oksilyè a ka bese pou evite li. 2. Sipò wou dyamèt varyab la leve epi bese pa silenn lan, epi li ka ajiste manyèlman nan diferan pozisyon echèl pou sipòte tiyo ki gen diferan gwosè.
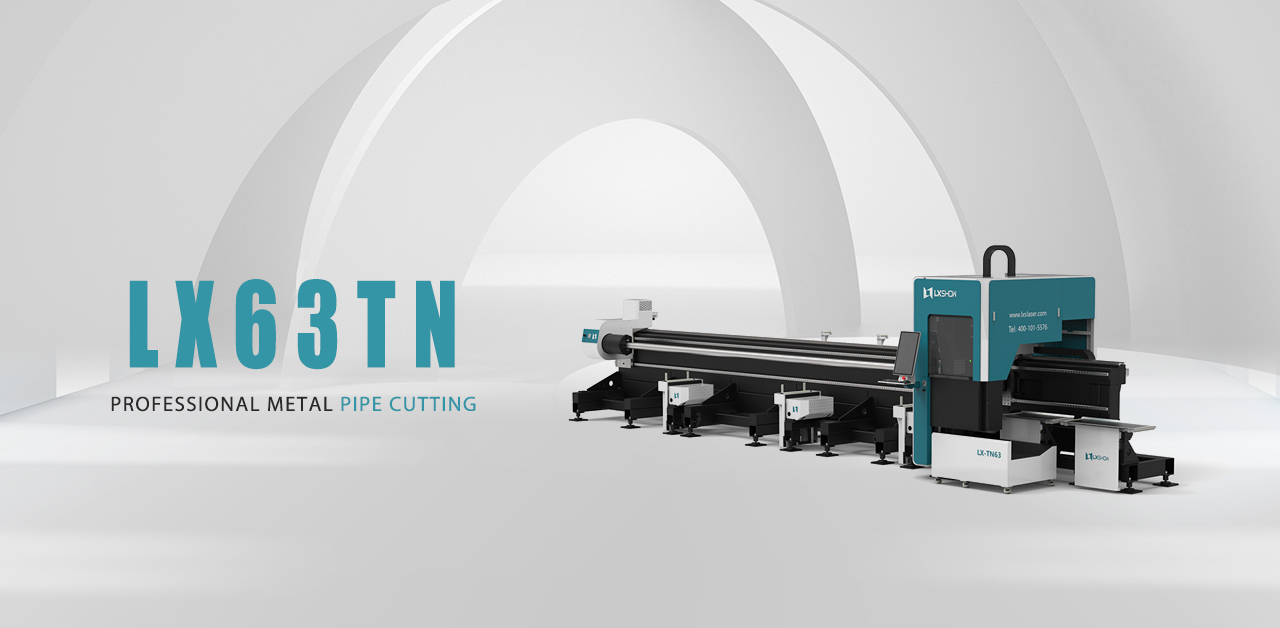
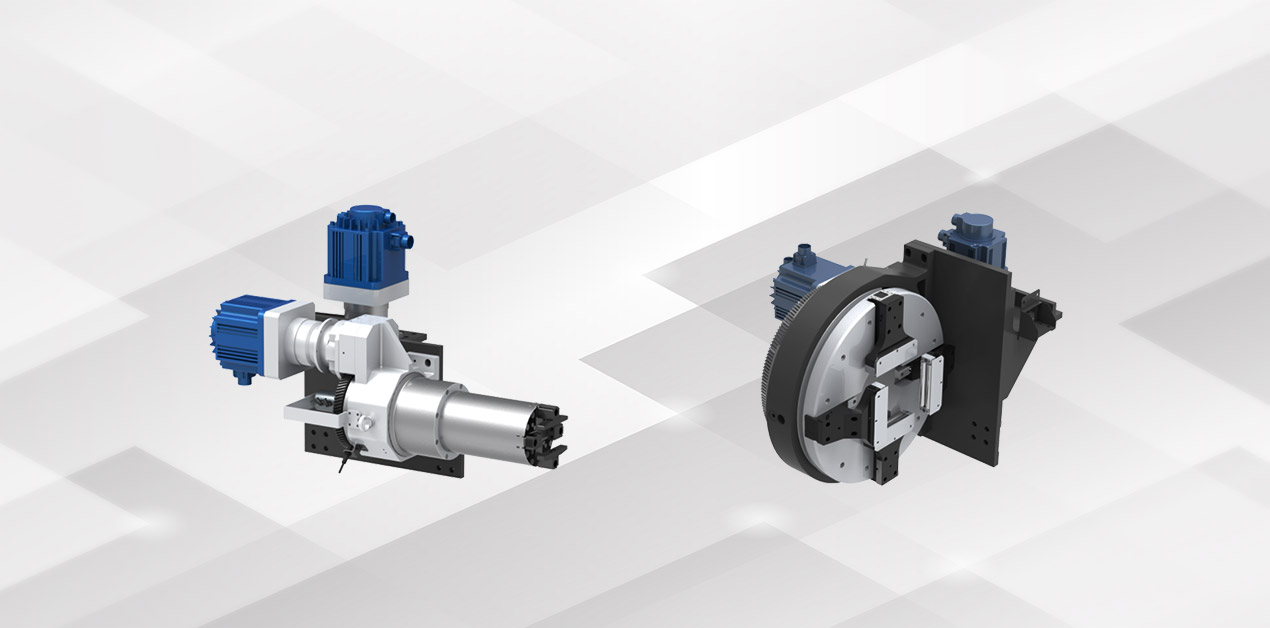
Mandren an divize an de mandren devan ak dèyè ki fonksyone ak yon kou konplè, toulede ka deplase nan direksyon Y la. Mandren dèyè a responsab pou sere epi alimente tiyo a, epi mandren devan an enstale nan fen kabann nan pou sere materyèl yo. Mandren devan ak dèyè yo kondwi respektivman pa sèrvo motè pou reyalize yon wotasyon senkron. Anba sere jwenti mandren doub yo, yo ka reyalize yon koupe kout ke, epi ke kout nan bouch la ka rive nan 20-40mm, tout pandan y ap sipòte koupe kout ke ki pi long lan. Machin koupe tiyo seri TN a adopte metòd mouvman ak evite mandren an, ki ka reyalize koupe a ak de mandren tout tan, epi li pa pral lakòz tiyo a twò long ak enstab, epi presizyon an pa ase.
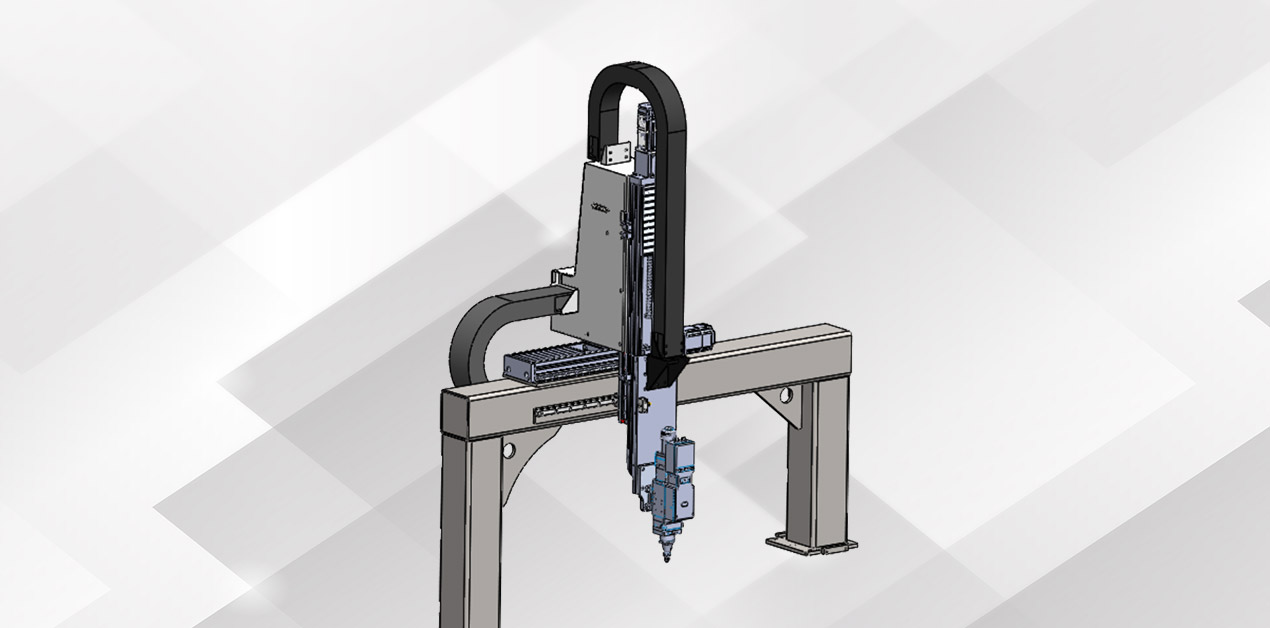
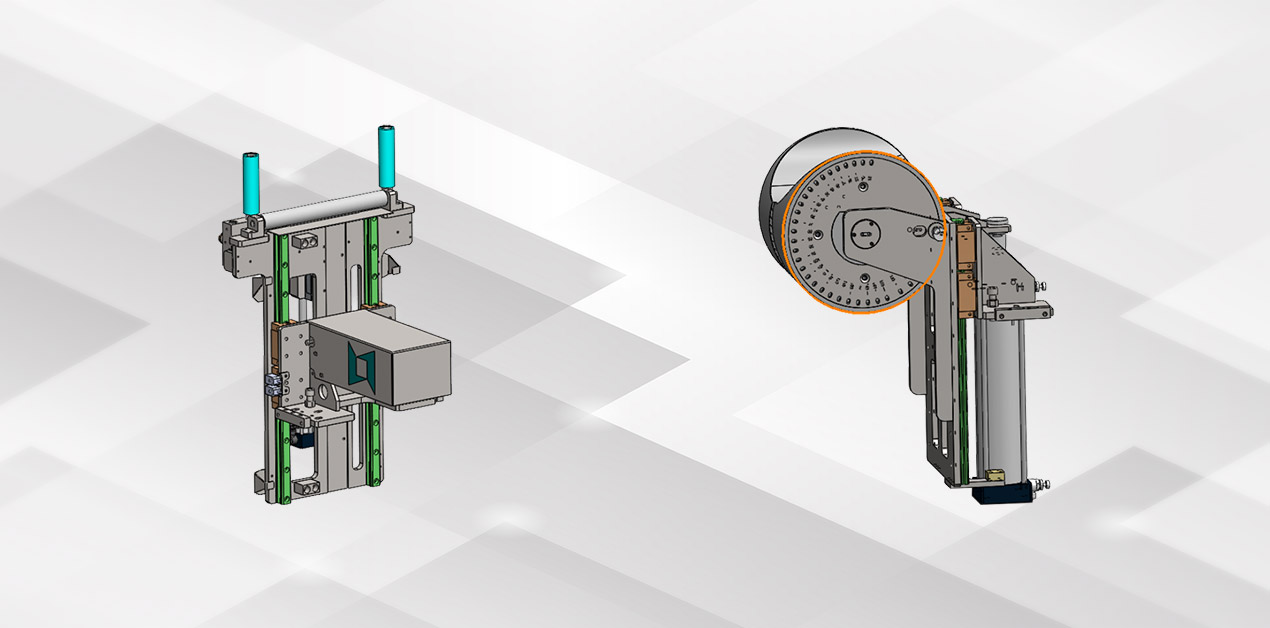
Travès aparèy aks X la adopte yon estrikti gantry, ki soude pa yon konbinezon tib kare ak plak asye. Eleman gantry a fiks sou kabann lan, epi aks X la kondwi pa yon motè sèrvo pou kondwi etajè a ak pyon an pou reyalize mouvman resipwòk plak glisman an nan direksyon X la. Nan pwosesis mouvman an, switch limit la kontwole kou a pou limite pozisyon an pou asire sekirite operasyon sistèm lan. An menm tan, aks X/Z la gen pwòp kouvèti ògàn li pou pwoteje estrikti entèn la epi reyalize pi bon pwoteksyon ak efè retire pousyè. Aparèy aks Z la sitou reyalize mouvman monte desann nan tèt lazè a. Aks Z la ka itilize kòm yon aks CNC pou fè pwòp mouvman entèpolasyon li, epi an menm tan, li ka lye ak aks X ak Y yo, epi li ka chanje tou pou kontwòl swivi pou satisfè bezwen diferan sitiyasyon yo.