







Taybetmendî
• Avahiya temam a bi pola hatiye qalibkirin, bi hêz û hişkbûna têrker;
• Avahiya hîdrolîk a daketina ber bi jêr, pêbawer û nerm;
• Yekîneya rawestandina mekanîkî, torka senkronîk, û rastbûna bilind;
• Paşpîvan mekanîzmaya paşpîvanê ya pêça T-type bi çîpek nerm, ku ji hêla motorekê ve tê ajotin, qebûl dike;
• Amûra jorîn bi mekanîzmaya tezmînata tansiyonê, Ji bo garantîkirina rastbûna bilind a xwarbûnê
Sîstema CNC
-Dîmendera ekranê
-Fonksiyona PLC ya yekbûyî
-Porta mişkê ya USB ya yekbûyî, porta klavyeyê, RS232, porta PLC ya ewle;
-Berhevkirina otomatîkî ya dema xebata makîneyê û dema xwarbûn/tewandinê;
-Bernamekirina destdana dîjîtal;
-Bernamekirina qalibên dîjîtal;
-Pîvandana otomatîkî ya daneyê;
-Hişyariya çewtiyê;Hydrau


Kelepçeya Bilez a Amûra Jorîn
· Amûra kelepçekirina amûra jorîn kelepçeka bilez e
Girêdana Qalibê Bingehîn a Pir-V (vebijarkî)
· Qaliba jêrîn a pir-V bi vebûnên cûda


Pîvana paş
· Rêbernameya pêç / lînerê topê rastbûnek bilind e
Piştgiriya Pêşiyê
· Platforma materyalê ya alloyûma aluminiumê, xuyangek balkêş,
Û zirara kar kêm bike.


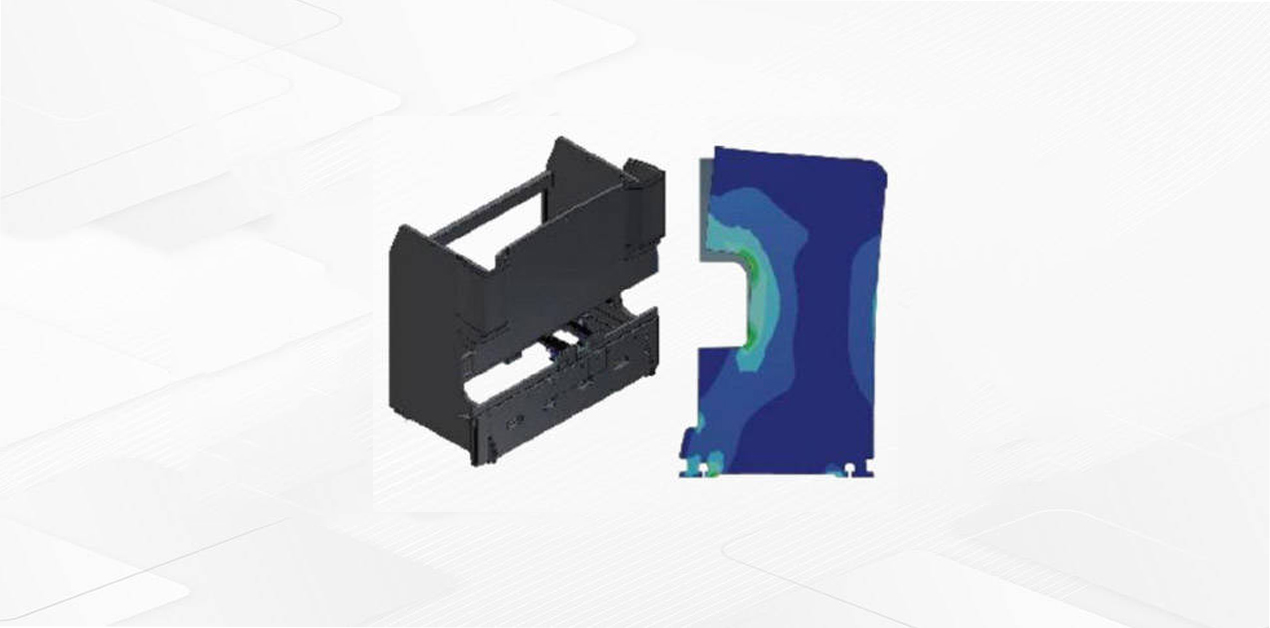
Tezmînata Tacgirtinê ya Vebijarkî ji bo Maseya Kar
· Qiloçek konveks ji komek qirloçên oblîk ên konveks pêk tê ku rûyek wan a xwar heye. Her qirloçek derketî li gorî xêza xwarbûnê û maseya xebatê bi analîza hêmanên dawîn ve tê sêwirandin.
· Sîstema kontrolkera CNC li gorî hêza barkirinê mîqdara tezmînata pêwîst hesab dike. Ev hêz dibe sedema xwarbûn û deformasyona plakayên vertîkal ên slayt û maseyê. Û tevgera nisbî ya qiloçê konveks bixweber kontrol dike, da ku bi bandor deformasyona xwarbûnê ya ji hêla slayt û raserê maseyê ve çêdibe tezmîn bike, û perçeya xebatê ya xwarbûnê ya îdeal bi dest bixe.
Guhertina Bilez a Qaliba Bingehîn
· Ji bo qalibê jêrîn kelepçeya guhertina bilez a 2-v qebûl bikin

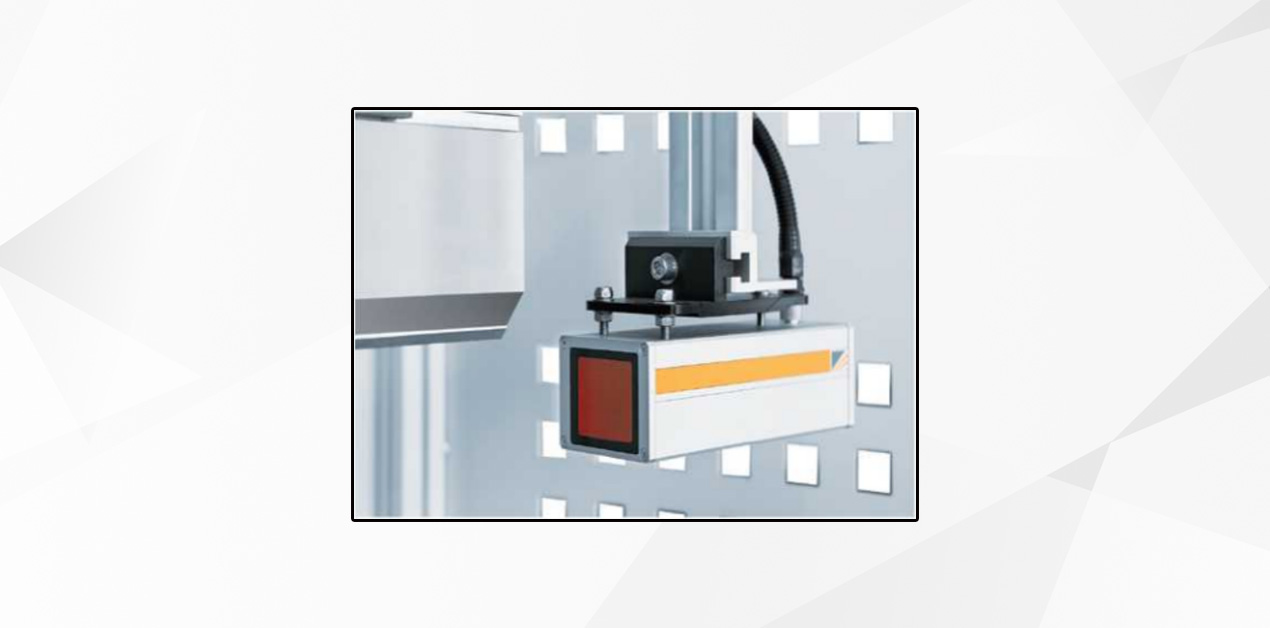
Parêzvanê Ewlehiyê yê Lasersafe
· Parêzvanê ewlehiyê yê Lasersafe PSC-OHS, ragihandin di navbera kontrolkera CNC û modula kontrola ewlehiyê de
· Tîrêjên dualî ji parastinê xala li jêr 4 mm li binê serê amûra jorîn in, da ku tiliyên operator biparêzin; sê herêm (pêş, navîn û rastîn) yên leaser dikarin bi nermî werin girtin, da ku pêvajoya xwarbûna qutiya tevlihev misoger bikin; xala bêdengkirinê 6 mm ye, da ku hilberîna bi bandor û ewle pêk were.
Alîkariya Bending Servo Mekanîkî
·· Dema ku plakaya piştgiriyê ya xwarbûna nîşanê dikare fonksiyona zivirandina şopandinê pêk bîne. Goşeya şopandinê û leza wê ji hêla kontrolkera CNC ve têne hesibandin û kontrol kirin, li ser rêberê xêzikî çep û rastê diçin.
· Bilindahîyê jor û jêr bi destan verast bike, pêş û paş jî dikarin bi destan werin verast kirin da ku ji bo vebûna cûda ya qalibê jêrîn guncan be
· Platforma piştgirîyê dikare ji firçe an lûleya pola zengarnegir be, li gorî mezinahiya perçeya kar, tevgera girêdana du piştgirî an tevgera cuda dikare were hilbijartin.
Sîstema hîdrolîk
Sîstema hîdrolîk a entegre ya pêşkeftî dipejirîne, sazkirina boriyan kêm dike û di xebitandina makîneyê de astek bilind a pêbawerî û ewlehiyê peyda dike.
Leza tevgera şemitokê dikare were pêkanîn. Daketina bilez, xwarbûna hêdî, çalakiya vegera bilez, û daketina bilez û leza hêdîbûnê dikarin bi guncanî werin verast kirin.
Sîstema kontrola elektrîkê
Parçeyên elektrîkê û materyal li gorî standardên navneteweyî, ewle, pêbawer û jiyanek dirêj in.
Makîne dabînkirina hêzê ya sê-qonaxî û çar-têl a 50HZ, 380V bikar tîne. Motora makîneyê sê-qonaxî 380V û çiraya xetê jî yek-qonaxî-220V bikar tîne. Veguherînera kontrolê du-qonaxî 380V bikar tîne. Derana veguherînera kontrolê ji hêla xeleka kontrolê ve tê bikar anîn, ku di nav wan de 24V ji bo kontrola pîvana paşîn û ji bo valvên berevajîkirina elektromagnetîk tê bikar anîn. Nîşaneya dabînkirina 6V, pêkhateyên din ên kontrolê yên 24V peyda dike.
Qutiya elektrîkê ya makîneyê li aliyê rastê yê makîneyê ye û bi cîhazek vekirina derî û qutkirina elektrîkê ve hatî çêkirin. Ji bilî guhêrbarê lingan, hemî pêkhateyên xebitandinê yên makîneyê li ser qutiya elektrîkê ne, û fonksiyona her hêmana xebitandinê ya stûnkirî bi sembola wêneyê ya li jor ve hatî nîşankirin. Dema ku deriyê qutiya elektrîkê vedike, ew dikare bixweber dabînkirina elektrîkê qut bike, û heke hewce bike ku were tamîrkirin, ew dikare bi destan were vesazkirin da ku leva guhêrbarê mîkro were kişandin.
Pîvana pêş û paş
Braketa pêşiyê: Ew li kêleka maseya kar tê danîn û bi pêçan ve tê ewlekirin. Dema ku pelên fireh û dirêj têne tewandin, ew dikare wekî piştgirek were bikar anîn.
Pîvana paşîn: Ew mekanîzmaya pîvana paşîn bi pêça topê û rêberê xêzikî bikar tîne ku ji hêla motora servo û kembera demjimêrê ya çerxa senkronîk ve tê ajotin. Tilîya rawestandina pozîsyona rast-bilind dikare bi hêsanî li ser tîrêjê rêberê rêhesinî yê ducarî yê xêzikî çep û rast were guheztin, û perçeya kar "wekî ku hûn dixwazin" tê tewandin.
-

Makîneya Bendinga Hîdraulîk a OEM ya Nû ya Pelgeya Metal C ...
-

Hîdrolîka Elektrîkî ya Performansa Baş a Pelgeya Metalê ...
-

Çêkirina Metalê ya Frêna Hîdrolîk a Top Seller ...
-

Makîneya Bendingê ya Nerm a LHA05 bi Bihayê Mesrefê ji bo ...
-

Çînê Factory Hot Sale New Multi-Function Bend ...
-

Makîneya Bendingê ya Servo ya Elektrîkî ya CNC ya tam paqij ...






