







Karakteristik
• Estrikti konplè an asye soude, ak ase fòs ak rijidite;
• Estrikti idwolik pou desann, fyab e lis;
• Inite arè mekanik, koupl senkron, ak gwo presizyon;
• Kalib dèyè a adopte mekanis kalib dèyè vis tip T a ak yon tij lis, ki kondwi pa yon motè;
• Zouti anwo a gen yon mekanis konpansasyon tansyon, pou garanti yon gwo presizyon nan koube a.
Sistèm CNC
-Ekran
-Fonksyon PLC entegre
-Pò sourit USB entegre, pò klavye, RS232, pò PLC an sekirite;
-Akimilasyon otomatik tan travay machin nan ak tan koube/pliye;
-Pwogramasyon taktil dijital;
-Pwogramasyon mwazi dijital;
-Kalibrasyon baz done otomatik;
-Avi avètisman erè; Idwolik


Klèn rapid zouti anwo a
· Aparèy pou bloke zouti anwo a se yon kranpon rapid
Multi-V anba mouri blokaj (opsyon)
·Moulen anba milti-V ak diferan ouvèti


Kalib dèyè
· Gid vis boul/revètman yo gen gwo presizyon
Sipò Devan
· Platfòm materyèl alyaj aliminyòm, aparans atiran,
Epi diminye grafouyen nan moso travay la.


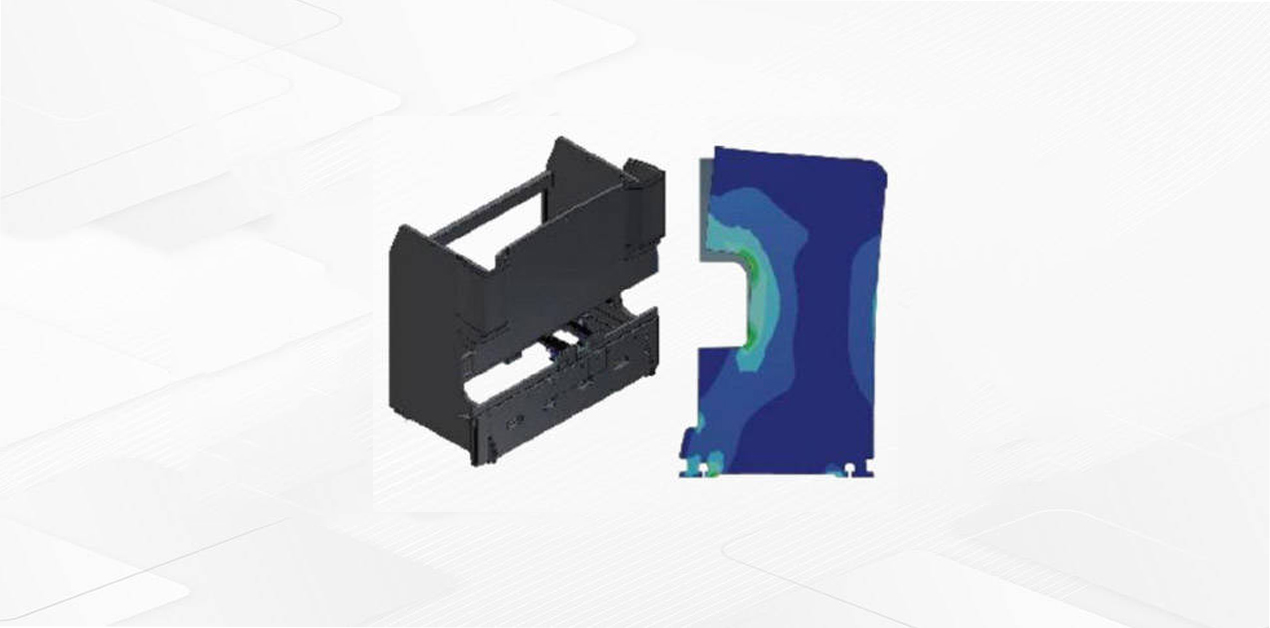
Konpansasyon Kouwòn Opsyonèl pou Tab Travay la
· Yon kwen konvèks konsiste de yon seri kwen oblik konvèks ak yon sifas bizote. Chak kwen ki soti deyò fèt pa analiz eleman fini dapre koub defleksyon glisad la ak tab travay la.
· Sistèm kontwolè CNC a kalkile kantite konpansasyon ki nesesè a baze sou fòs chaj la. Fòs sa a lakòz devyasyon ak defòmasyon plak vètikal glisyè a ak tab la. Epi li kontwole otomatikman mouvman relatif kwen konvèks la, pou konpanse efektivman pou defòmasyon devyasyon ki koze pa glisyè a ak remonte tab la, epi pou jwenn pyès koube ideyal la.
Chanjman rapid anba mouri
· Adopte yon chanjman rapid 2-v pou fèmen anba a

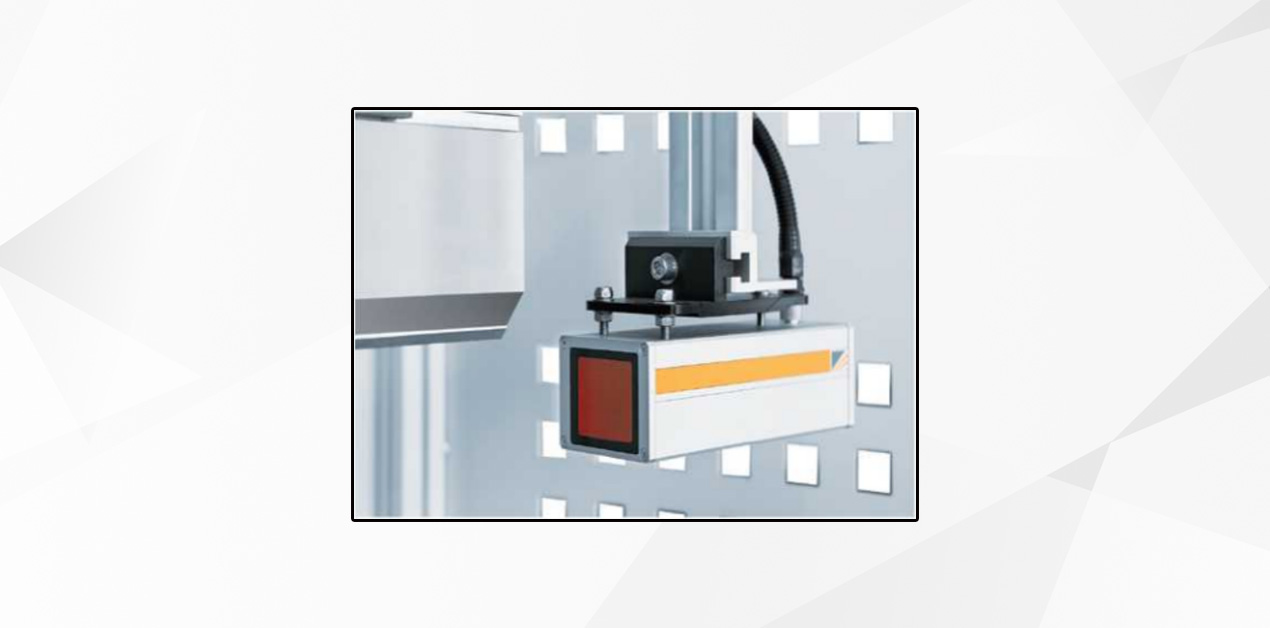
Gad Sekirite Lasersafe
· Pwoteksyon sekirite Lasersafe PSC-OHS, kominikasyon ant kontwolè CNC ak modil kontwòl sekirite
· Doub travès pwoteksyon yo se pwen anba 4mm anba pwent zouti anwo a, pou pwoteje dwèt operatè a; twa rejyon (devan, mitan ak reyèl) nan leaser la ka fèmen fleksibilite, asire pwosesis konplèks koube bwat; pwen silans lan se 6mm, pou reyalize yon pwodiksyon efikas ak an sekirite.
Èd pou pliye servo mekanik
·· Lè plak sipò koube mak la ka reyalize fonksyon pou vire sou swivi. Ang swivi ak vitès yo kalkile epi kontwole pa kontwolè CNC a, deplase sou gid lineyè agoch ak adwat.
· Ajiste wotè a monte desann alamen, ou ka ajiste devan ak dèyè a manyèlman tou pou adapte ak diferan ouvèti mwazi anba a.
· Platfòm sipò a kapab bwòs oswa tib asye pur, selon gwosè pyès la, ou ka chwazi de mouvman lyezon sipò oswa mouvman separe.
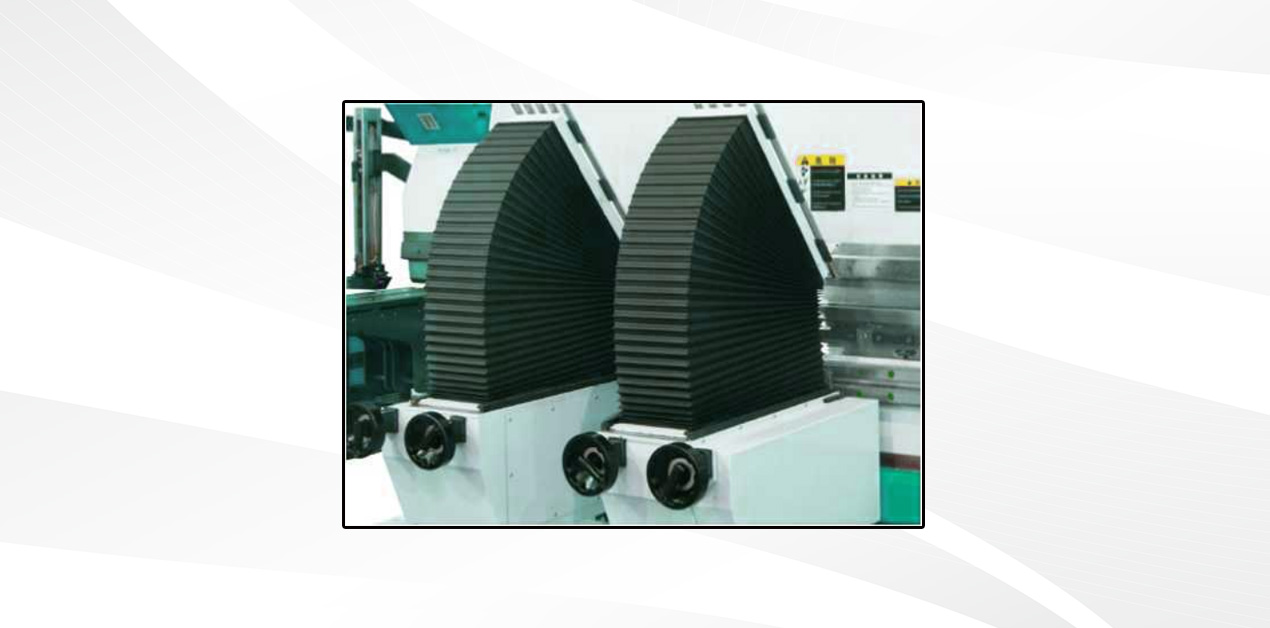
Sistèm idwolik
Adopte yon sistèm idwolik entegre avanse ki diminye enstalasyon tuyaux epi asire yon wo degre fyab ak sekirite nan operasyon machin nan.
Vitès mouvman kurseur la ka reyalize. Ou ka ajiste desant rapid, koube dousman, retounen rapid, ak vitès desann rapid, ralantisman kòmsadwa.
Sistèm kontwòl elektrik
Konpozan elektrik ak materyèl satisfè estanda entènasyonal yo, an sekirite, fyab ak lavi ki long.
Machin nan adopte yon ekipman pou pouvwa kat fil twa faz 50HZ, 380V. Motè machin nan adopte yon ekipman pou pouvwa twa faz 380V epi lanp liy lan adopte yon sèl faz 220V. Transfòmatè kontwòl la adopte yon ekipman pou pouvwa de faz 380V. Bouk kontwòl la itilize pwodiksyon transfòmatè kontwòl la, pami yo 24V yo itilize pou kontwòl kalib dèyè ak pou valv ranvèse elektwomayetik yo. Endikatè a gen yon ekipman pou 6V, ak lòt konpozan kontwòl yo gen yon ekipman pou 24V.
Bwat elektrik machin nan sitiye sou bò dwat machin nan epi li ekipe ak yon aparèy pou ouvèti pòt la epi pou etenn li. Tout eleman operasyon machin nan konsantre sou bwat elektrik la eksepte switch pye a, epi fonksyon chak eleman operasyon yo make ak senbòl imaj ki anlè li. Li ka koupe ekipman pou kouran an otomatikman lè w ap louvri pòt bwat elektrik la, epi si li bezwen reparasyon, ou ka retabli li manyèlman pou rale levye mikwo switch la.
Kalib devan ak dèyè
Sipò devan: Li plase sou bò tab travay la epi li byen fikse ak vis. Li ka sèvi kòm yon sipò lè w ap pliye fèy laj ak long.
Kalib dèyè: Li adopte yon mekanis kalib dèyè ak yon vis boul epi gid lineyè a kondwi pa yon motè sèrvo ak yon senti distribisyon wou senkron. Dwèt arè pozisyonman wo presizyon an ka fasilman deplase agoch ak adwat sou travès doub ray gid lineyè a, epi pyès la pliye "jan ou vle".






